Social Robotic Walker
A self-guided robotic walker for the elderly had been engineered by the Robotics Institute at Carnegie Mellon. I worked with a team of designers and researchers to develop a robust touchscreen navigation system.

The Problem
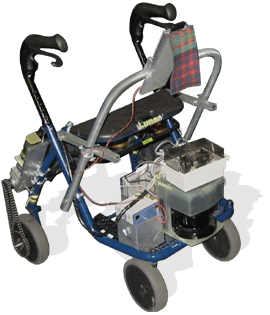
The existing system used a GPS and a programmed floor layout to automatically park and retrieve a modified Swedish rollator. It showed the current location on a monochrome PDA strapped to the frame of the walker. My team was given the opportunity to improve the location and navigation system.We were required to utilize the existing robotic framework with the addition of a 10" Acer color touchscreen.
Our Approach
We met with individuals in a local elder care center to begin understanding the people and their environment. We used this information to develop personas and scenarios for our design.We conducted a literature review on the navigational and perceptual problems assocated with advanced age, and sketched several concepts that avoided complex hierarchies or abstract representations of the environment.
Solution
Because only a fraction of the elder care population both required and could utilize navigation support, we designed our navigation system to also facilitate social interactions. Images from the public areas of the nursing home slowly pan across the screen showing implicitly whether ad hoc meetings are underway throughout the building.A touch of the screen switches transparently to navigation mode, with an arrow overlay showing the way. The image of the destination remains as a reminder, along with large-type information about any scheduled activities for that area. Once the destination is reached, the arrow goes away, and the system returns to browse mode.
I created a Flash demo to mimic the behavior of the GPS for user testing. We used input from a hidden operator with a Bluetooth wireless keyboard to control the demo and simulate the responses to a touchscreen. This prototyping system allowed us to guage interaction problems during our tests and quickly make adjustments.